Background
As a part of taking GA Tech’s Motion Systems course, the final project involved working on a team to design a control system for a problem of our own choice. My team decided to pursue designing and implementing a control method for stabilizing a Furuta Pendulum. This kind of inverted pendulum is mounted at the end of an arm which rotates about a vertical axis. The goal is to balance the pendulum in an upright position by rotating the central arm in the appropriate manner.

Design
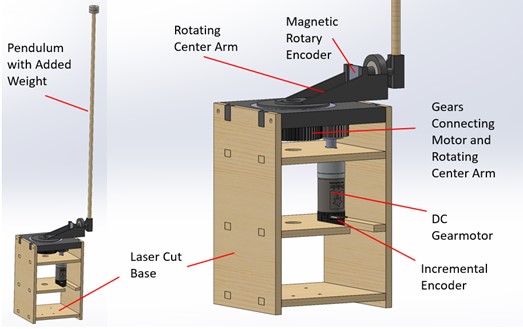
The mechanical design of the system consists of a laser cut frame that holds a DC gearmotor connected to the central arm’s axis of rotation with an additional set of 3D printed spur gears. The top of the frame contains a bearing and slip ring that allow rotation of the central arm. A magnetic rotary encoder is used to detect the angle of the pendulum, and an incremental encoder mounted on the bottom of motor provides information about the rotation of the motor itself. The pendulum itself is a wooden dowel with added mass at the tip that slows down the mechanical behavior of the system.
Programming/Control
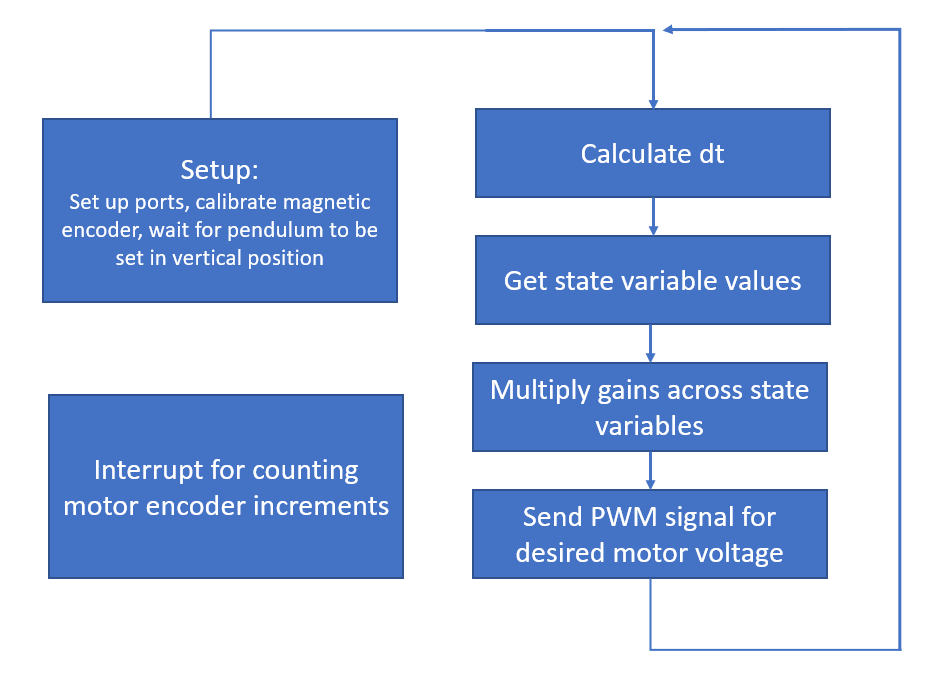
Control was first attempted using a PI controller designed using pole placement via root locus. This method was moderately successful at keeping the angle of the pendulum stable, but it failed to account for the rate of rotation of the arm, which tended to stay in motion, causing issues with overall stability. Realizing that the system had outputs both of the form of pendulum angle and horizontal arm angular speed, we altered our control method to using pole placement in state space. The control algorithm for this was programmed in C++ on an Arduino Mega. The general structure of the code can be seen on the accompanying diagram.
Final Product
Converting to a state space control method greatly increased the performance of the system by keeping the pendulum vertical as well as keeping the rate of arm rotation low. The video below shows the effectiveness of altering the control scheme from a classical method of PI compensation versus a more modern implementation of state space control.
Collaborators
- Leland Toney
- [Pending permission to use name]
